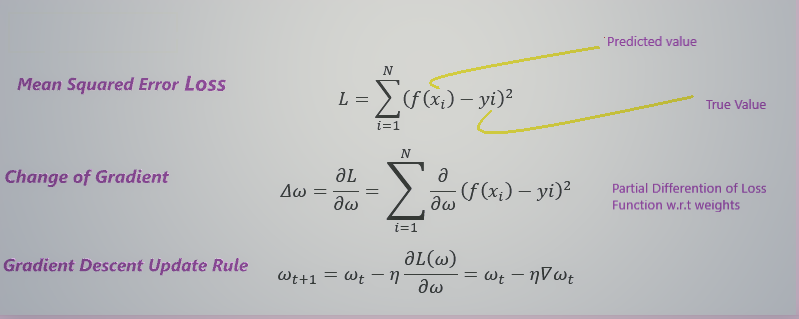
What after Gradient Descent

In Batch Gradient Descent, the parameters(weights) are updated after a pass over the entire data (one epoch). So, in case of very large number of records, updates happen less, and large number of epochs are required to achieve minimal loss.
In Stochastic Gradient Descent, the parameters are updated after pass over single data point. It leads to large number of parameter updates in a single run over the entire data (one epoch). This eventually causes a lot of oscillations in the loss, as each data point directs the gradient as per its understanding without considering other points. Also, Stochastic gradient descent is not true but an approximate of the gradient value as the true value can be derived only considering the whole data.
In Mini Batch Gradient Descent, the parameters are updated after one pass over the mini batch (usually a power of 2). This reduces the number of oscillations and also serves to update the parameters more often than the Batch Gradient Descent. The size of mini batch is usually 32,64,128.
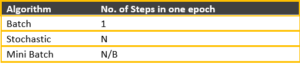
Here N = No. of data points, B = size of Mini Batch












Recent Comments